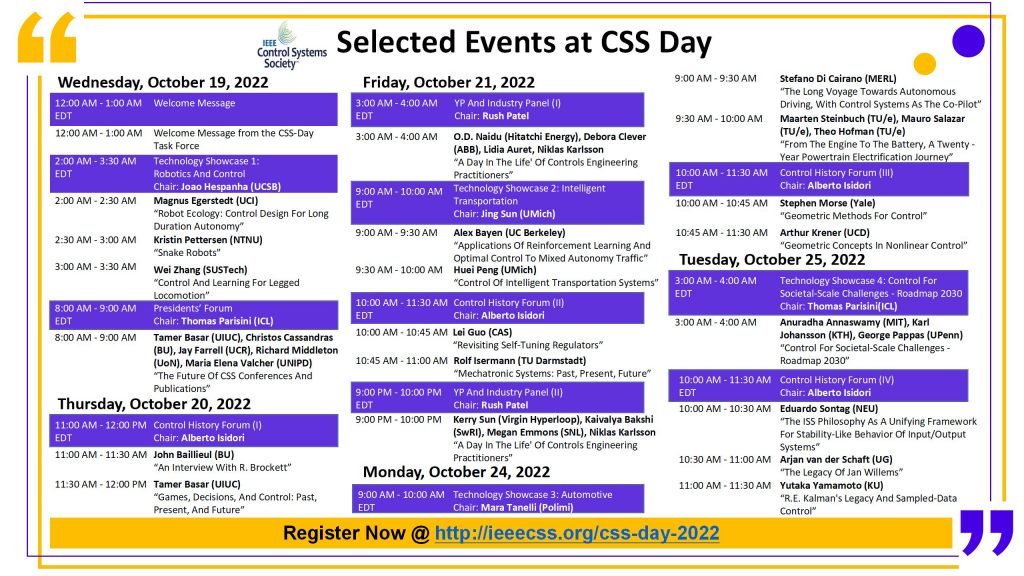
Prof. Zhang was invited to attend and give a talk named “Control And Learning For Legged Locomotion” at the 2022 CSS Day, held between October 19-21 online.
Here is the absract of this talk: Legged robots have attracted considerable attention from both academia and industry recently, owing to their superior ability of traversing complex terrains as compared with wheeled mobile robots. They are well suited for applications such as surveillance and monitoring in cluttered environments, search and rescue, last-mile delivery and logistics, among others. With recent progress in high-performance actuators, the hardware design of legged robot becomes relatively mature, while perceptive locomotion control algorithms still present significant challenges, preventing widespread deployment of legged robots in real-world applications. This talk will present recent developments in legged robots from both academic and industrial perspectives. Key research challenges in legged locomotion control will be identified. Both model-based and learning-based planning and control methods will be introduced, and their fundamental connections will be discussed. The results will be presented along with various experimental validations based on commercial platforms as well as legged robots custom designed and built by our lab.