CLEAR Lab: Our Annual Get-Together
Recently, we held our annual team gathering. The day included a year-end…

News
Recently, we held our annual team gathering. The day included a year-end…
Prof. Zhang was invited to attend and gave an invited talk at…
On July 3, 2025, at the Southern University of Science and Technology…

We are pleased to announce that nine students from our lab have…

团队简介 CLEAR(Control & Learning for Robotics and Autonomy)实验室致力于机器人控制理论与学习算法方面的研究。目前研究重点包括足式机器人感知与控制,足式机器人移动操作等。同时也从事机器人相关的控制、优化、机器学习等方面的算法与理论研究。实验室与美国Ohio State University,CMU,UC Berkeley,UIUC,Purdue,MIT,Notre Dame,香港科技大学,香港大学等国际知名高校有科研合作与访问交流机会。实验室尤其注重理论与应用的结合,与多家机器人领域知名企业保持良好的交流与合作关系。…
Prof. Bowen Weng visited our lab and gave a talk, entitled “On…

Prof. Wenzhen Yuan visited our lab and gave a talk, entitled “Making…
Prof. Maani Ghaffari visited our lab and gave a talk, entitled “Computational…

Prof. Zhang was invited to attend and give a talk named "Control…

A paper written by Zhi XU et al. in which Zhi XU is…
Dr. Ye Tao visited our lab and gave a talk, entitled “Surfing on the…

Members of Clearlab went to Yantian Central Park for team building, to…

Dr. Dapeng LI joined our lab as a research professor. He received his…
Prof. Michael Yu Wang visited our lab and gave a talk, entitled “Robotic…

Six papers from CLEAR LAB have been accepted by IROS 2021! IROS (IEEE/RSJ International Conference…
Prof. Jie Huang visited our lab and gave a talk, entitled “The…

A delegation led by Mayor Rugui Chen visited our lab as part…

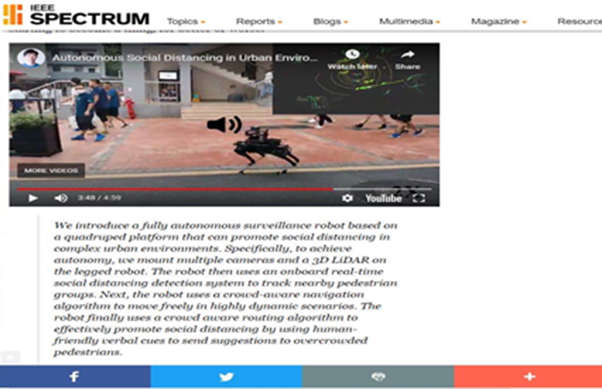
Our work on deploying quadrupedal robots in monitoring and promoting social distance…
Lin Zhao, a former PhD student from CLEAR Lab, started a tenure-track…

Sen Li, a former PhD student from CLEAR Lab, started his tenure…

Prof. Dongrui Wu visited our lab at and gave a talk, entitled…

Prof. Jing Sun visited our lab and discussed possible research collaborations in…

Prof. Zhang was invited to attend and gave an invited talk at…
July 9-12, Southern University of Science and Technology (SUSTech) sent its first…

Four undergraduate students in our lab, Shenggao Li, Chunchu Zhu, Wenchun Lin,…

Prof. Frank Chongwoo Park visited our lab and gave a talk, entitled…

Dr. Hua Chen joined our lab as a research assistant professor. He…

In collaboration with Robosea, a world-leading company in underwater robotics, we founded…

We attended the International Conference on Robotics and Automation (ICRA) 2019, and…

Linfang Zheng joined our lab as a research assistant. She obtained her…
