Welcome to the CLEAR Lab at SUSTech!
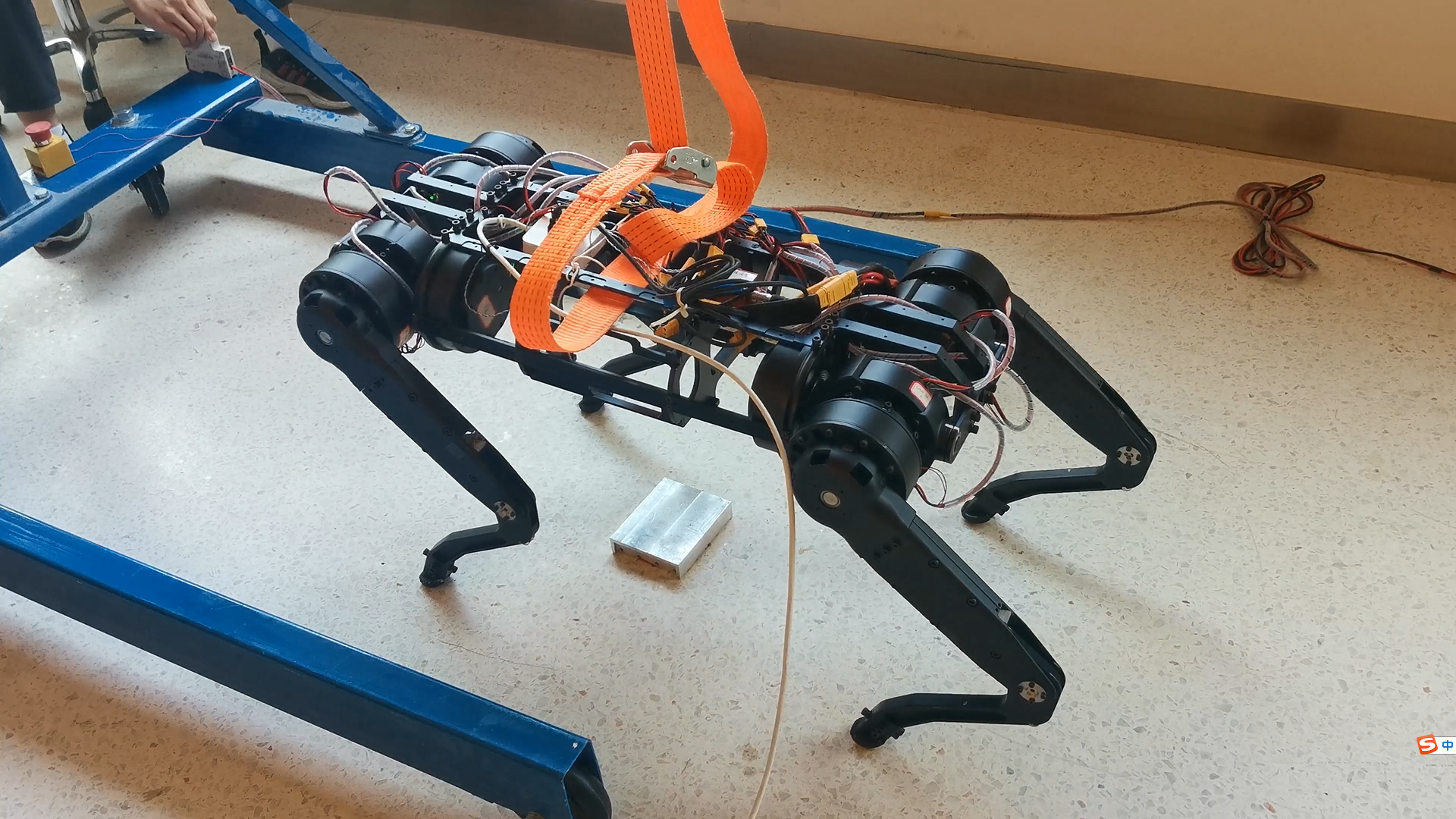
The Control & Learning for Robotics and Autonomy (CLEAR) Lab, led by Prof. Wei Zhang, focuses on advancing robotics and autonomous systems through innovative research in control and learning theory.
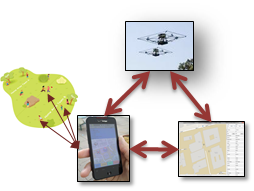
We tackle challenges in dynamic modeling, control design, and robot-environment interaction, with applications ranging from legged locomotion to autonomous navigation and manipulation. As part of the School of Automation and Intelligent Manufacturing (AiM) initiative, our mission is to bridge theory and practice to shape the future of intelligent systems.