Legged robot represents one of the most challenging robotic systems with rather complex dynamics. Although there are many cool videos about legged robots, a principled way to design a legged robot system does not exist in the literature, especially for dynamic locomotion. Numerous engineering tricks are needed to produce a cool demo, which usually only work in very specific scenarios.
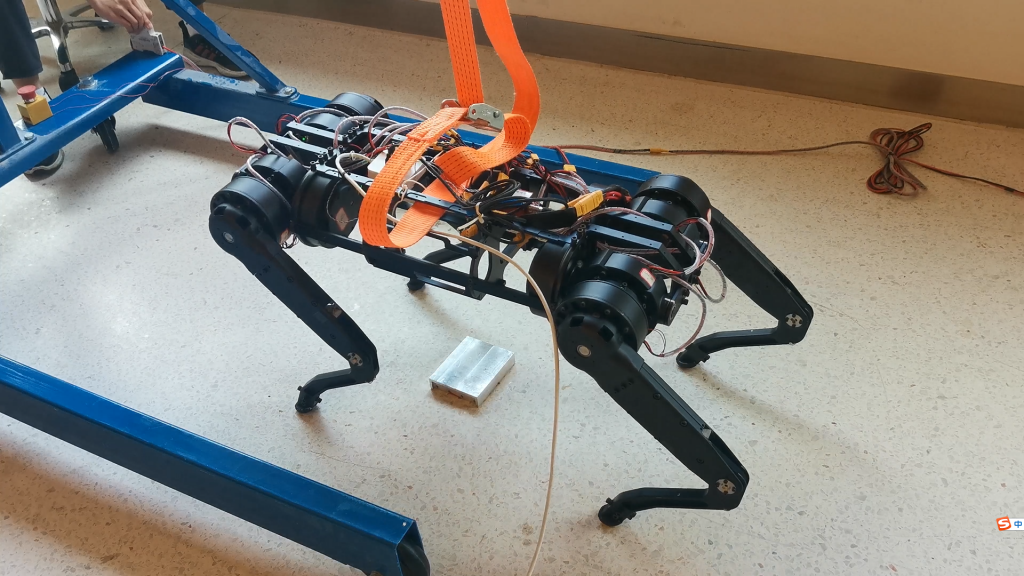
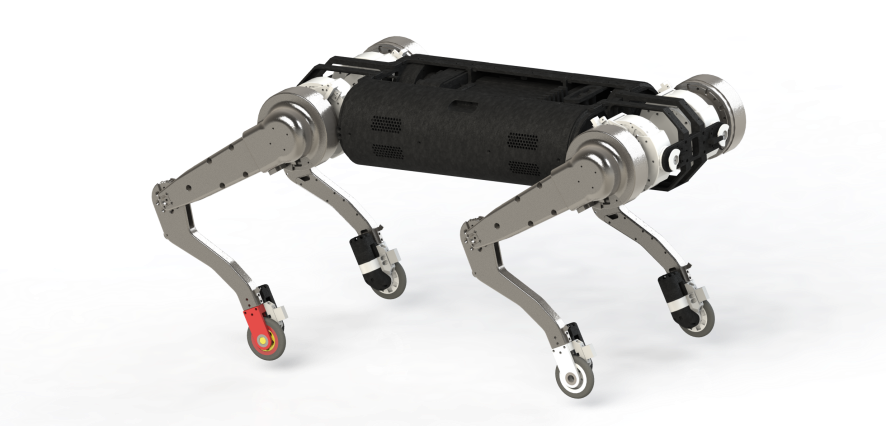
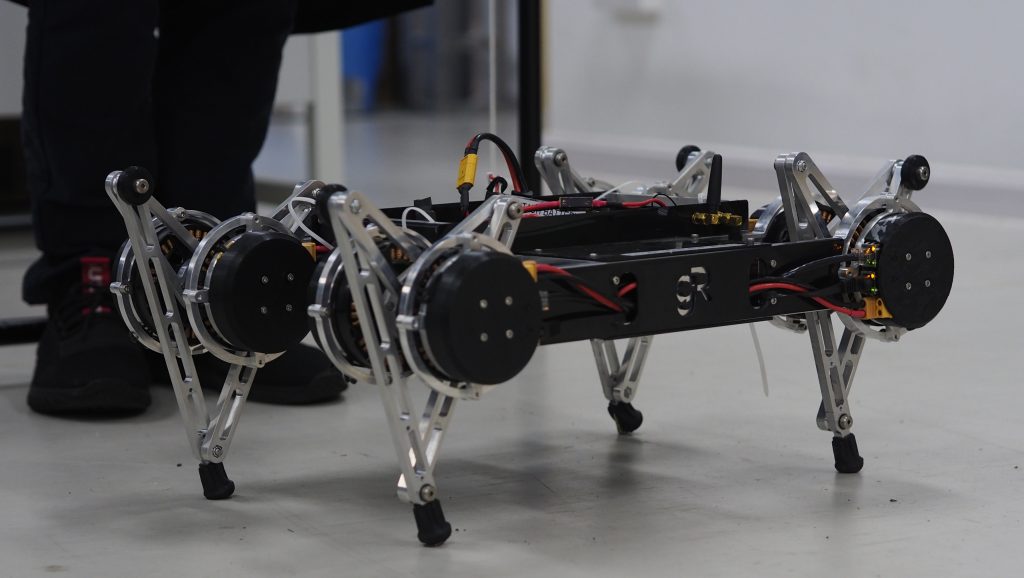
We are interested in advancing the “science” for legged robot and aim to develop new theoretic and algorithmic tools to enable more formal/systematic solution to modeling and control problems of legged robot. We test our results on popular experimental platforms, e.g. (GR Minitaur, Aliengo, Laikago, etc), as well as on in-house system built by our students.