Our paper entitled “Improved Task Space Locomotion Controller for a Quadruped Robot with Parallel Mechanisms” is accepted by IROS 2022.
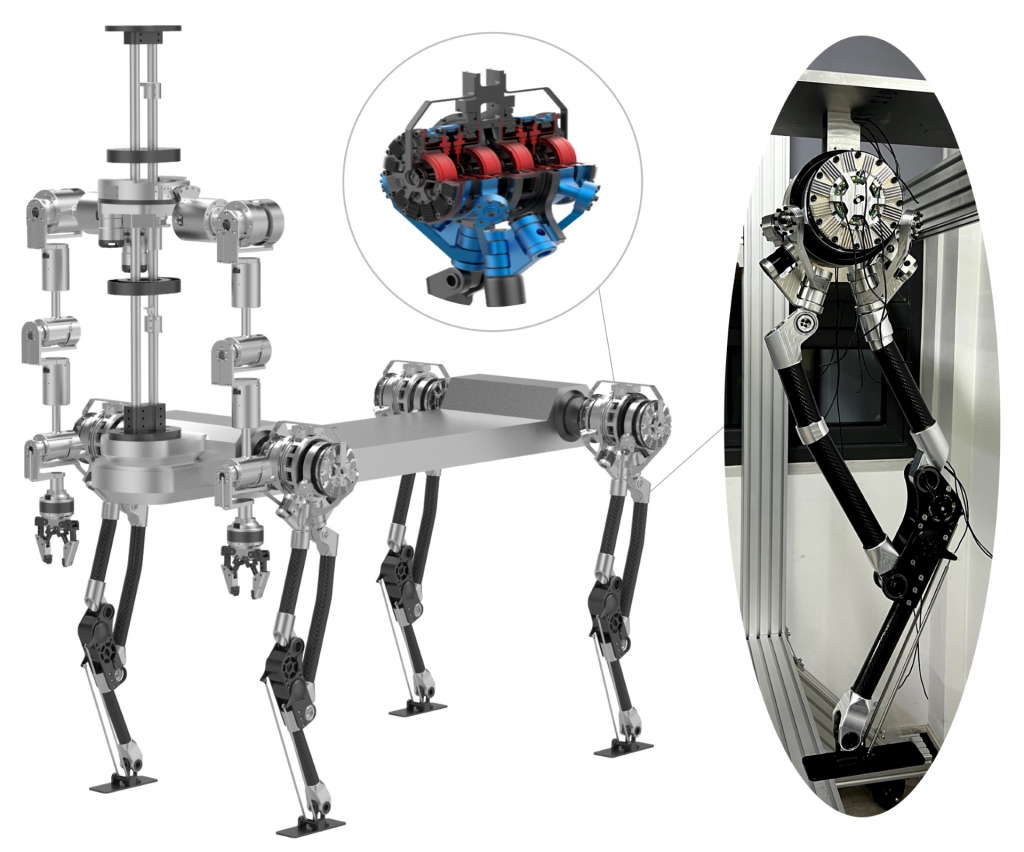
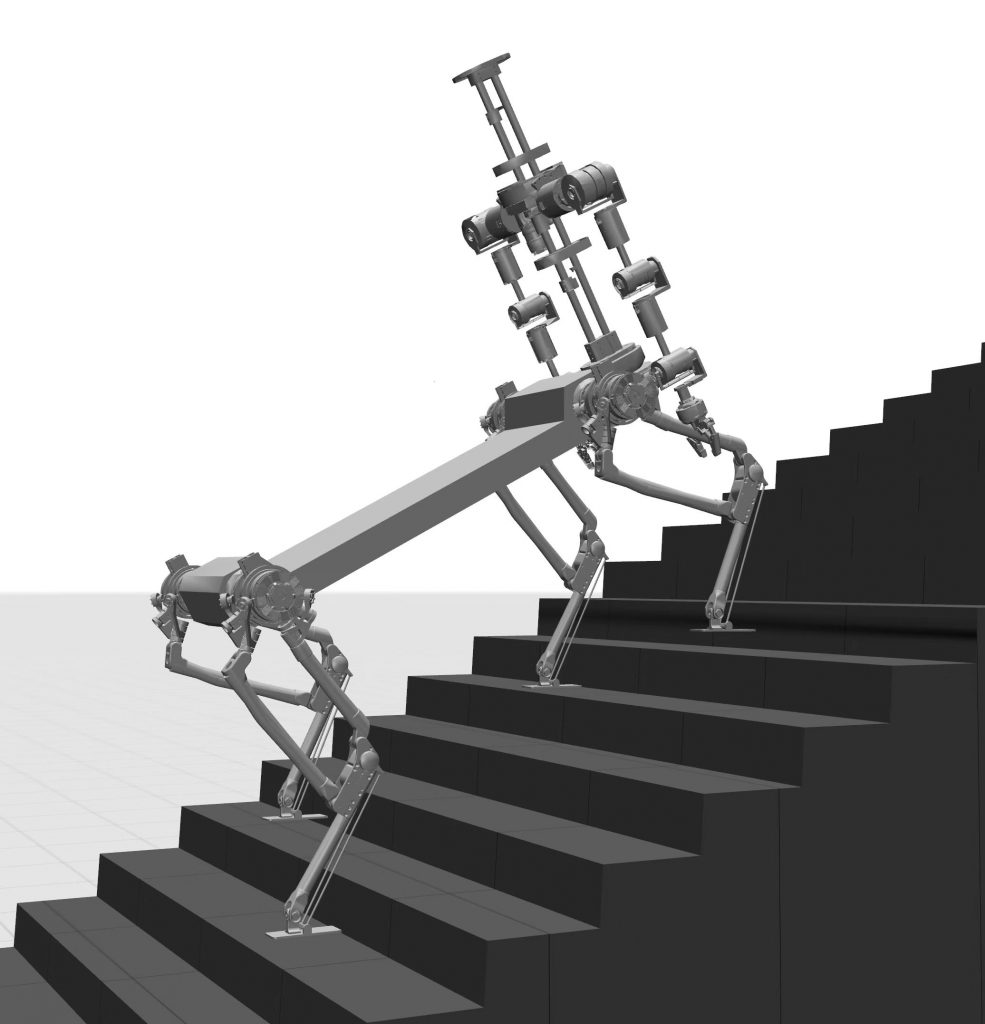
An advanced quadruped robot with abundant kinematic loops and passive joints is introduced. Due to the existence of many closed chains, the robot dynamic model is quite complex, and is derived using the Gauss’s principle of least constraint. To explicitly consider the loop- closure constraints, we propose a task-space inverse dynamics based approach to obtain the robot locomotion controller. Besides, to meet the demand of high frequency (≥ 500Hz) in controller, an alternative method is provided. It uses the projected dynamics to find an analytical mapping from the desired contact force to the desired torque of actuators under full consideration of passive joints and loop-closure constraints. The effectiveness and efficiency of the proposed algorithms in this paper have been validated by simulation with a reliable physical engine MuJoCo.