Balancing is a fundamental ability that a legged robot, especially a bipedal robot, should possess. Throughout the history of legged locomotion literature, balance control has been extensively studied for simple models such as the linear inverted pendulum thanks to the concept of the instantaneous capture point (ICP), yet the constant center of mass height assumption limits the application.
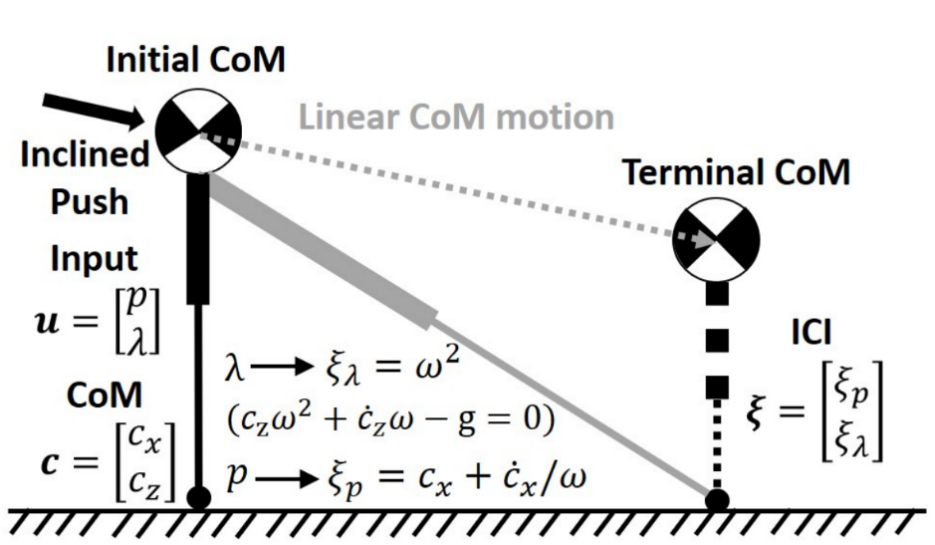
This paper explores balancing of the variable-height inverted pendulum (VHIP) model by introducing the instantaneous capture input (ICI) concept, a direct extension of the seminal ICP idea based on its key properties. Namely, the ICI can be computed as a function of the state, and when this function is used as the control policy, the ICI is rendered stationary, and the system will eventually come to a stop. This characterization induces an analytical region of capturable states for the VHIP, which can be used to conceptually guide where to step. To further address state and control constraints during recovery, we present and theoretically analyze an explicit ICI-based controller with online optimal feedback gains.
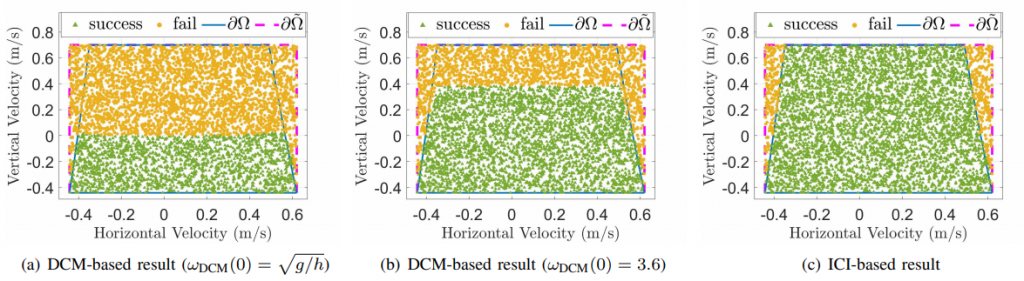
Simulations demonstrate the validity of our controller for capturability maintenance compared to an approach based on the divergent component of motion.
Preprint available at https://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=9484816