Our paper entitled “Quadruped Capturability and Push Recovery via a Switched-Systems Characterization of Dynamic Balance” is accepted by T-RO 2023 and has been presented at IROS 2023.
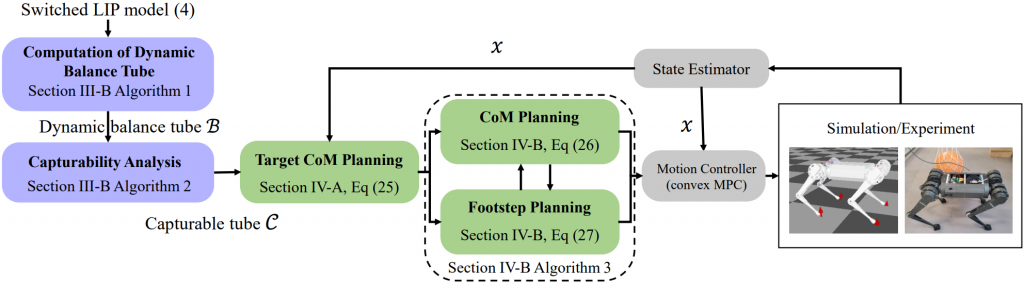
This paper studies capturability and push recovery for quadruped locomotion. Despite the rich literature on capturability analysis and push recovery for legged robots, existing tools have been developed mainly with the requirement of reaching static or quasi-static balance following a push. In practice, this requirement commonly restricts capturability analysis to cases with simple dynamics, and fails to encode time-dependence of capturable states for legged locomotion with time-based gaits. To address these issues, we apply switched systems to model quadruped locomotion and extend capturability notions through a novel specification of dynamic balance. We also provide an explicit model predictive control (EMPC) scheme to compute the dynamic balance and capturable tubes, and offer a way of using the capturable tube to synthesize push recovery controllers. Such a generalization allows for a rigorous characterization of disturbance timing on capturability of quadrupedal locomotion and opens the door of disturbance-timing-aware push recovery control strategies. Extensive simulation and hardware experiments illustrate the necessity of considering dynamic balance for quadrupedal push recovery, reveal how disturbance timing affects capturability, and demonstrate the significant improvement in disturbance rejection with the proposed strategy. Hardware experimental validations on a replica of the Mini Cheetah quadruped further verify that the proposed approach performs statistically better than the state-of-the-art baseline considered.