This paper presents a control strategy for quadruped robots to hop on their rear legs in three-dimensional space. The proposed approach generates nominal center of mass (CoM) trajectories based on a template spring-loaded inverted pendulum (SLIP) model. Tracking this reference remains a challenge due to the underactauted nature of balance with point feet.
To address this aspect, a control-Lyapunov-function based quadratic programming (CLF-QP) controller modulates nominal ground reaction forces (GRFs) to balance the torso while considering friction limits. The CLF construction is guided by a variational-based linearization (VBL) applied to a reduced-order single-rigid-body (SRB) model, and treats underactuation via solving a Riccati equation to obtain the CLF. A new balance control approach is presented that effectively decouples sagittal plane control (via re-planning) with lateral and rotational control (via the CLF and VBL). The proposed approach shows more robust balancing than when using a conventional CLF-QP approach.
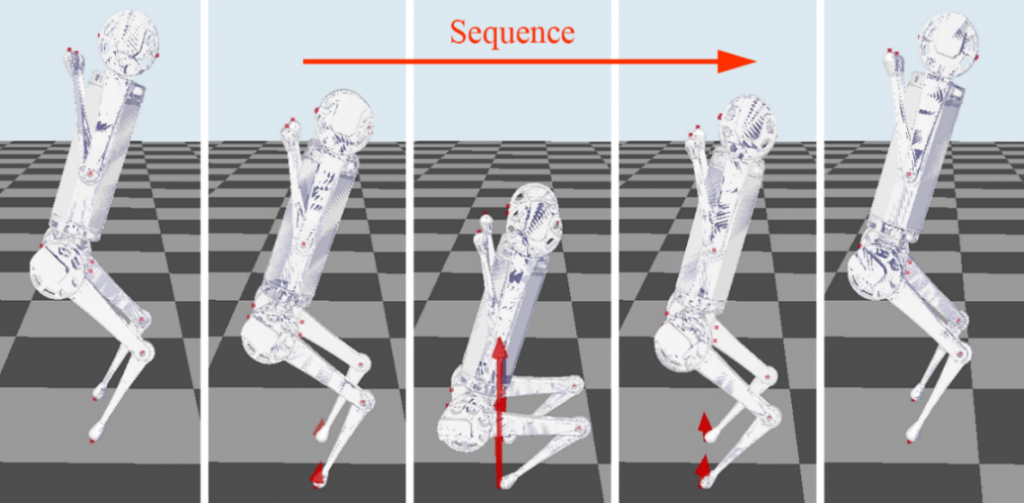
Simulation on the Mini Cheetah platform demonstrates in-place hopping with up to a 0.77 m apex height.