Our paper entitled “Real-Time Collision-Free Motion Planning and Control for MobileManipulation with Quadrupeds” is accepted by ROBIO 2023.
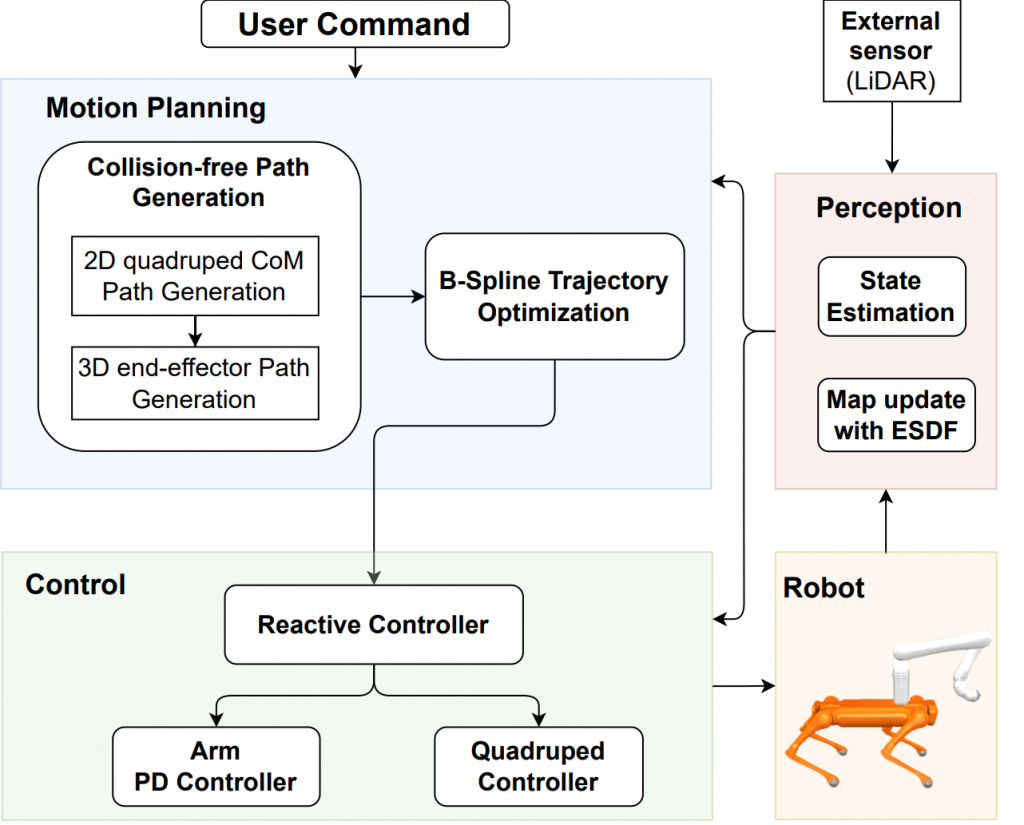
In this paper, we study the mobile manipulationproblem with a quadruped-arm system in cluttered enviorn-ment. To address this problem systematically, we propose areal-time collision-free motion planning and control frameworkthat distributes the collision avoidance task into multiple layers.In details, we decompose the overall legged mobile manipulatorsystem into a quadruped subsystem and an arm subsystem, planthe collision-free trajectories for the base and the end-effectorwhile respecting their inherent kinematic constraint. Then withthe guidance of the base and end-effector trajectories, we canfind feasible velocity commands for the quadruped and thearm respectively by solving a quadratic programming problemwith the collision-free constraint to guarantee safety of thewhole body system. After getting the velocity commands for thequadruped, we further synthesize a customized model predic-itve controller to track the given reference while incorporatingthe effect of the moving arm. The framework is validated bythe navigation and manipulation tasks in simulation with areal legged-mobile manipulator system. In the experiments,the average computation time for our motion planner is 76ms and the planned trajectory is smoother and faster thanthe existing motion planners. Simultaneously, the collisionavoidance requirement can be obeyed during the whole process.