Our paper entitled “Three-Dimensional Dynamic Running with a Point-Foot Biped based on Differentially Flat SLIP” is accepted by IROS 2022.
This paper presents a novel framework for point-foot biped running in three-dimensional space. The proposed approach generates center of mass (CoM) reference trajectories based on a differentially flat spring-loaded inverted pendulum
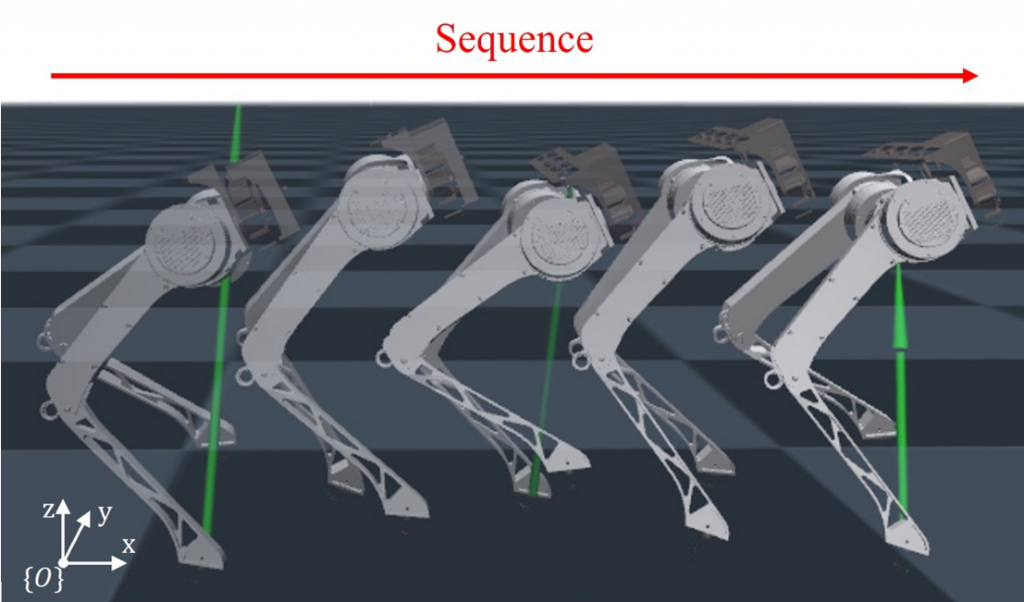
(SLIP) model. A foothold planner is used to select touch down location thatrenders optimal CoM trajectory for upcoming step in real time. Dynamically feasible trajectories of CoM and orientation are subsequently generated by a simplified single rigid body (SRB) model based model predictive control (MPC). A task-space controller is then applied online to compute whole-body joint torques which embeds these target dynamics into the robot. The proposed approach is evaluated on physical simulation of a 12 degree-of-freedom (DoF), 7.5 kg point-foot bipedal robot. The robot achieves stable running at at varying
speeds with maximum value of 1.1m/s. The proposed scheme is shown to be able to reject vertical disturbances of 8N.s and lateral disturbance of 6.5 N.s applied at the robot base.