
Our paper entitled “Underactuated Motion Planning and Control for Jumping with Wheeled-Bipedal Robots” is accepted by IEEE Robotics and Automation Letters
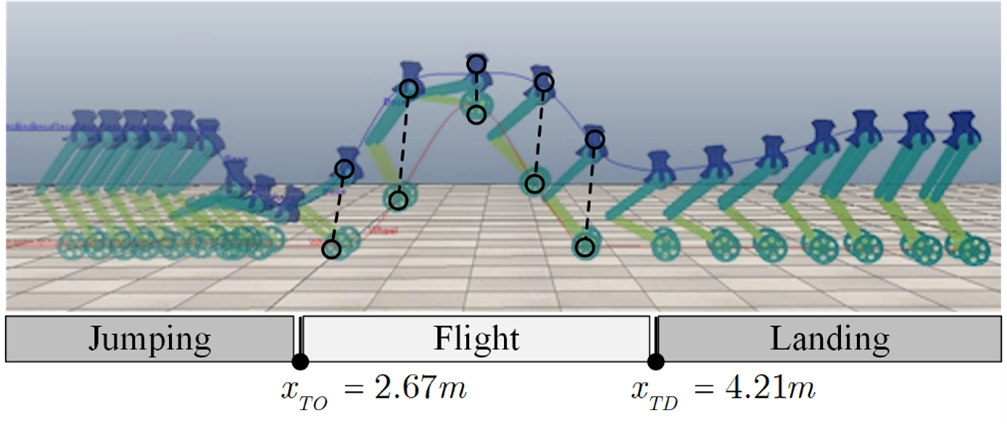
This paper studies jumping for wheeled-bipedal robots, a motion that takes full advantage of the benefits from the hybrid wheeled and legged design features. A comprehensive hierarchical scheme for motion planning and control of jumping with wheeled-bipedal robots is developed. Underactuation of the wheeled-bipedal dynamics is the main difficulty to be addressed, especially in the planning problem. To tackle this issue, a novel wheeled-spring-loaded inverted pendulum (W-SLIP) model is proposed to characterize the essential dynamics of wheeled-bipedal robots during jumping. Relying on a differential-flatness-like property of the W-SLIP model, a tractable quadratic programming-based solution is devised for planning jumping motions for wheeled-bipedal robots. Combined with a kinematic planning scheme accounting for the flight phase motion, a complete planning scheme for the W-SLIP model is developed. To enable accurate tracking of the planned trajectories, a linear quadratic regulator-based wheel controller and a task-space whole-body controller for the other joints are blended through disturbance observers. The overall planning and control scheme is validated using V-REP simulations of a prototype wheeled-bipedal robot.
Preprint available at https://arxiv.org/pdf/2012.06156.pdf
Video Link: https://www.bilibili.com/video/BV1Mt4y1r7z7