Our paper entitled “Vision-based Six-Dimensional Peg-in-Hole for Practical Connector Insertion” is accepted by ICRA 2023.
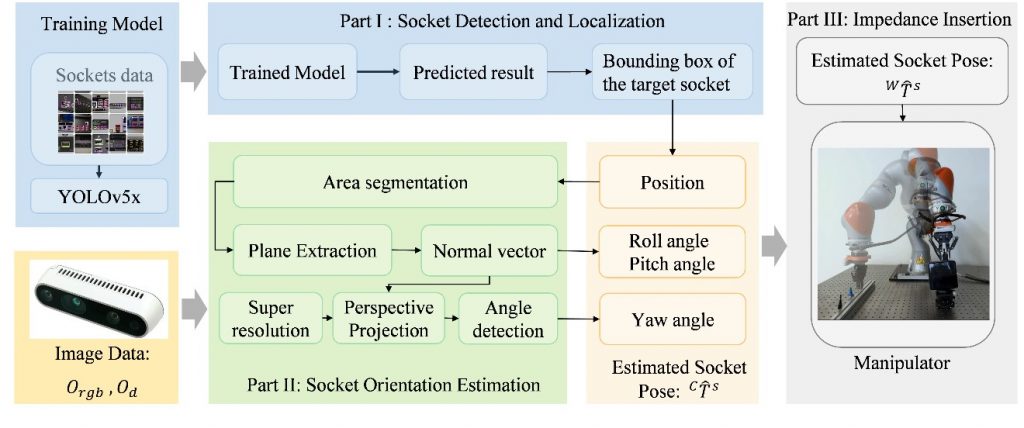
We study six-dimensional (6D) perceptive peg-in-hole problem for practical connector insertion task in this paper. To enable the manipulator system to handle different types of pegs in complex environments, we develop a perceptive robotic assembly system that utilizes an in-hand RGB-D camera for peg-in-hole with multiple types of pegs. The proposed framework addresses the critical hole detection and pose estimation problem through combining the learning-based detection with model-based pose estimation strategies. By exploiting the structure of the peg-in-hole task, we consider a rectangle-shape based characterization for modeling the candidate socket. Such a characterization allows us to design simple learning-based methods to detect and estimate the 6D pose of the target socket that balances between processing speed and accuracy. Without the need of additional search, our method achieves an acceptable success rate in the connector insertion tasks. The results confirm the reliability of our method and show that our method is suitable for real world application.